Vektor
Vektorer är matematiska storheter som har både storlek (magnitud) och riktning. De används därför ofta för att beskriva fysikaliska storheter med magnitud och riktning i rummet, som till exempel kraft, hastighet, acceleration, elektriskt fält och magnetfält. Sådana vektorer kallas även rumsvektorer eller geometriska vektorer. Ibland studeras rumsvektorer även i två dimensioner. I motsats till vektorstorheter är storheter som temperatur och ljusstyrka skalärer då de saknar riktning.
Inom matematiken generaliseras vektorer till att vara element i ett vektorrum av godtycklig dimension. En sådan generaliserad vektor kan ha en norm som anknyter till längdbegreppet. För vektorrummet kan en inre produkt vara definierad vilken kan sägas mäta vinklar mellan vektorerna. Med denna definition kan många typer av objekt anses vara vektorer. Det enda kravet är att de följer de viktigaste av de räkneregler som gäller för rumsvektorer.
Historik
Vektorbegreppet, såsom vi känner det idag, utvecklades gradvis över en period av mer än 200 år. Omkring ett dussin personer gjorde signifikanta bidrag. [1]
Giusto Bellavitis abstraherade den grundläggande idén 1835 när han etablerade begreppet ekvipollens. Han studerade det euklidiska planet och definierade som ekvipollenta (likvärdiga) varje par av linjesegment av samma längd och riktning. Väsentligen upptäckte han en ekvipollensrelation för paren av punkter (tvåpunkter) i planet och skapade därmed det första vektorrummet i planet.[1]:52–4
Termen vektor introducerades av William Rowan Hamilton som en del av en kvaternion, vilken är en summa q = s + v av ett reellt tal s (också kallat skalär) och en 3-dimensionell vektor v. Liksom Bellavitis, betraktade Hamilton vektorer som en representation av klasser av ekvipollent riktade linjesegment. I analogi med komplexa tal, som använder en imaginär del för att komplettera den reella tallinjen, betraktade Hamilton vektordelen v som den imaginära delen av en kvaternion.[2]
Flera andra matematiker utvecklade vektorliknande system under 1800-talets mitt, däribland Augustin Louis Cauchy, Hermann Grassmann, August Möbius, Comte de Saint-Venant och Matthew O'Brien . Grassmanns arbete från 1840 Theorie der Ebbe und Flut var det första systemet av rumslig analys som liknade dagens system och presenterade idéer som motsvarar kryssprodukt, skalärprodukt och vektordifferentiering. Grassmanns arbete uppmärksammades först i slutet av 1870-talet.[1]
Peter Guthrie Tait fortsatte att arbeta med kvaternioner efter Hamilton. Hans Elementary Treatise of Quaternions från 1870 inkluderade en utförlig behandling av nablaoperatorn ∇.
1878 publicerades Elements of Dynamic av William Kingdon Clifford, ett verk som förenklade studiet av kvaternionen genom att isolera skalärprodukten och kryssprodukten av två vektorer från den kompletta kvaternionprodukten, vilket gjorde vektorberäkningar tillgängliga för ingenjörer och andra som arbetade i tre dimensioner och var skeptiska till den fjärde.
Josiah Willard Gibbs, som stötte på kvaternioner genom James Clerk Maxwells Treatise on Electricity and Magnetism, skilde av deras vektordel för en oberoende behandling. Den första halvan av Gibbs Elements of Vector Analysis, publicerad 1881, presenterade vad som väsentligen är det moderna systemet för vektoranalys.[1] 1901 publicerade Edwin Bidwell Wilson Vector Analysis, som i huvudsak var tillämpningar hämtade från Gibbs föreläsningar och som övergav allt omnämnande av kvaternioner.
Vektorbeteckningar

Ett vektornamn skrivs vanligen med fet stil, till exempel som
I vissa fall kan även notationen
förekomma där A är vektorns startpunkt och B dess ändpunkt.
Andra vanliga notationer är
där en pil eller "hatt" placerats ovanför namnet.
Representation av vektorer


En vektor är inte bunden till en position och det är därför tillåtet att förlägga en vektors startpunkt i origo i det aktuella koordinatsystemet; en konvention som ger en kompakt koordinatlista. Vektorer i ett n-dimensionellt rum ℝn kan då representeras av en lista med koordinaterna för vektorernas ändpunkter enligt
Talen i listan kallas också vektorns komponenter. I enlighet med figuren till höger kan den 2-dimensionella vektorn från O = (0, 0) till A = (2, 3) skrivas som
En vektor kan också beskrivas genom att koordinatlistor anges för både start- och ändpunkter.
I ℝ3 identifieras vektorer med tripplar av koordinater:
eller
Ibland arrangeras dessa tripplar till kolonnvektorer eller radvektorer, särskilt i samband med hantering av matriser:
Ett annat sätt att representera vektorer är att introducera standardbasvektorer, vilket i det tredimensionella fallet kräver tre vektorer. Standardbasvektorerna har längden 1 och riktningar som sammanfaller med riktningarna för koordinatsystemets (kartesiskt) tre axlar:
Med hjälp av standardbasvektorerna kan varje vektor skrivas som
I elementära läroböcker i fysik betecknas ofta basvektorerna med (eller , där ^ vanligtvis betecknar enhetsvektorn). I detta fall betecknas vektorkoordinaterna enligt ax, ay, az, och ax, ay, az. Således,
För vektorer kan basbyten utföras och nya vektorer kan användas som bas. En vektor kan transformeras till att representeras i vilken som helst av dessa nya baser.
Egenskaper och operationer
Identiska vektorer
Två vektorer är identiska om vektorerna har samma storlek och riktning. De två vektorerna
och
är identiska om och endast om
Addition och subtraktion
Summan av två vektorer
är
Den resulterande vektorns komponenter är de komponentvisa summorna av vektorernas komponenter vilket kan generaliseras till alla dimensioner.
Differensen mellan a och b är
Subtraktionen a - b kan tolkas som additionen a + -b.
Längd
Längden eller magnituden eller normen av vektorn a betecknas ||a||.
Längden av vektorn a kan i ett vektorrum med euklidisk norm beräknas med Pytagoras sats enligt
då koordinataxlarna är vinkelräta mot varandra i detta vektorrum.
Normen är även lika med kvadratroten ur skalärprodukten (se nedan) av vektorn med sig själv:
Vektorer med längden 1 kallas enhetsvektorer och nollvektorn har längden noll. Normalisering av en vektor a = [a1, a2, a3], sker genom att vektorn multipliceras med det reciproka värdet av vektorns längd, ||a||:
Vektormultiplicering
Skalär multiplikation

Om en vektor multipliceras med ett reellt tal r (en skalär) ändras vektorns längd (skalning av vektorn):
Om r är negativ kastas vektorns riktning om, det vill säga, vektorn roteras 180°.
Skalär multiplikation är distributiv över vektoraddition
- r(a + b) = ra + rb
för alla vektorer a och b och alla skalärer r.
Skalärprodukt

Skalärprodukten av två vektorer a och b (ibland kallad inre produkt) betecknas a ∙ b och dess resultat är en skalär (ett reellt tal, här en längd multiplicerad med en längd) och är definierad som
där θ är mätetalet för vinkeln mellan a och b. Geometriskt innebär detta att a och b kan antas dragna från en gemensam startpunkt och längden av projektionen av a på b är multiplicerad med b:s längd.
Skalärprodukten kan i ett ortonormerat koordinatsystem definieras som summan av de komponentvisa produkterna enligt
Skalär trippelprodukt

Skalära trippelprodukten definieras som skalärprodukten av en vektor och kryssprodukten (se nedan) av två andra vektorer:
Trippelprodukten kan geometriskt tolkas som volymen av en parallellipiped som spänns upp av de tre vektorerna.
Trippelprodukten kan beräknas enligt
Om vektorerna i kryssprodukten byter plats negeras trippelprodukten:
Den skalära trippelprodukten kan också tolkas som determinanten till en 3 × 3 matris som har tre vektorer som rader eller kolumner (transponering av en matris ändrar inte determinantens värde):
Kryssprodukt


Kryssprodukten (också kallad vektorprodukt eller yttre produkt) är bara meningsfull i tre eller sju dimensioner. Kryssprodukten skiljer sig från skalärprodukten genom att resultatet är en vektor. Kryssprodukten, betecknad a × b, är en vektor vinkelrät mot både a och b och definieras som
där θ är mätetalet för vinkeln mellan a och b, och n är en enhetsvektor vinkelrät mot både a och b som tillsammans med dessa bildar ett högerorienterat system.
Längden av a × b kan tolkas som arean av en parallellogram som har a och b som sidor.
Kryssprodukten kan i ett ortonormerat koordinatsystem också skrivas som
Kryssprodukten är antikommutativ:
Den är distributiv för addition:
Kryssprodukten är relaterad till skalärprodukten enligt
Vektoriell trippelprodukt
Den vektoriella trippelprodukten är kryssprodukten av en vektor och kryssprodukten av två andra vektorer:
- .
Då kryssprodukten är antikommutativ kan detta också skrivas
En annan användbar formulering är
Vektorprojektion

Projektionen av en vektor a på en vektor b (en vektorkomponent i b:s riktning) är den ortogonala projektionen av a på en rät linje parallell med b och definieras som
där är en skalär, kallad den skalära projektionen av a på b och b̂ är enhetsvektorn i b:s riktning. Den skalära projektionen definieras i sin tur som
där operatorn · betecknar skalärprodukt, |a| är den euklidiska normen av a och θ är vinkeln mellan a och b. Den skalära projektionen har samma längd som vektorprojektionen.
Vektorkomponenten a2 av a vinkelrät mot b är
När vinkeln θ är okänd kan cosinus θ beräknas med hjälp av a och b och definitionen av skalärprodukt:
Med hjälp av denna egenskap blir definitionen av den skalära projektionen
På liknande sätt blir definitionen av a:s vektorprojektion på b
vilket är ekvivalent med endera
eller[3]
Exempel

Bestäm avståndet mellan två linjer i R3 givna i parameterformerna
där riktningsvektorerna för linjerna är
Kortaste avståndet representeras av en sträcka d = PQ som är ortogonal mot linjerna. Vektorn är linjernas normalvektor med samma riktning som sträckan PQ. En vektor för linjen mellan linjernas fixa punkter är
Avståndet d mellan linjerna är projektionen av på :
Vektorer i ℝ2 och komplexa tal
Komplexa tal kan ses som ett fall av vektorer i ℝ2. Ett komplext tal har en realdel och en imaginärdel som kan representeras som komponenter i en vektor och som även kan ritas som en vektorpil i det komplexa talplanet. Addition, subtraktion, skalning och längdberäkning utförs som för rumsliga vektorer i ℝ2. Komplexa tal medger dessutom vanlig multiplikation och division.
En annan förbindelse mellan komplexa tal och vektorer är vektorer vars komponenter är komplexa tal (komplexvärda vektorer).
Vektorfält
Ett vektorfält är en tilldelning av en vektor till varje punkt i en delmängd av rummet.
 En del av vektorfältet (sin y, sin x)
En del av vektorfältet (sin y, sin x)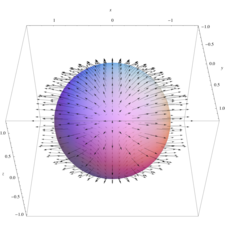 Ett vektorfält på en sfär
Ett vektorfält på en sfär Vektorfält runt ett flygplan, visualiserat med bubblor
Vektorfält runt ett flygplan, visualiserat med bubblor
Exempel på vektorfält:
- Gradientfält
- Divergensfält
- Rotationsfält
- Skalärpotential, gradientens invers
Se även
- Egenvärde, egenvektor och egenrum
- Enhetsvektor
- Kontravariant vektor
- Kovariant vektor
- Kovarians och kontravarians (vektorer)
- Linjärt rum (vektorrum)
- Normalvektor
- Ortsvektor
- Poyntings vektor
- Pseudovektor (axiell vektor)
- Rumsvektor
- Talföljd
- Vektoranalys
Referenser
- Folke Eriksson, Flerdimensionell Analys, Studentlitteratur Lund 1971
Noter
- ^ [a b c d] Michael J. Crowe, A History of Vector Analysis; se även hans föreläsning med samma titel ”A History of Vector Analysis”. Arkiverad från originalet den 26 januari 2004. https://web.archive.org/web/20040126161844/http://www.nku.edu/~curtin/crowe_oresme.pdf. Läst 4 september 2010..
- ^ W. R. Hamilton (1846) London, Edinburgh & Dublin Philosophical Magazine 3rd series 29 27
- ^ ”Dot Products and Projections”. Arkiverad från originalet den 31 maj 2016. https://web.archive.org/web/20160531080405/http://math.oregonstate.edu/home/programs/undergrad/CalculusQuestStudyGuides/vcalc/dotprod/dotprod.html. Läst 3 november 2017.
Vidare läsning
- Gavel, Hillevi (2011). Grundläggande linjär algebra. Studentlitteratur. Libris 12242337. ISBN 9789144076058
- Sparr, Gunnar, 1942- (1995 ;). Linjär algebra. Studentlitteratur. OCLC 187001658. http://worldcat.org/oclc/187001658. Läst 15 juni 2019
- Månsson, Jonas.. Linjär algebra.. ISBN 9789144127408. OCLC 1097632984. http://worldcat.org/oclc/1097632984. Läst 15 juni 2019
Externa länkar
 Wikimedia Commons har media som rör Vektor.
Wikimedia Commons har media som rör Vektor.
| ||||||||||||||||||||||||||
Media som används på denna webbplats

Författare/Upphovsman: Svjo, Licens: CC BY-SA 4.0
Distans between lines by vectors


Författare/Upphovsman: Svjo, Licens: CC BY-SA 4.0
Coordinate system with base vectors

The vector field represented by plotted over the unit sphere. Vectors have been uniformly scaled down to 0.2 times their original length for aesthetics. Originally created as an image for the example problem on the divergence theorem page to replace the less relevant image here.

{kind=link}

Författare/Upphovsman: BenFrantzDale, Licens: CC BY-SA 3.0
A wind tunnel model of a Cessna 182 showing a wingtip vortex. Tested in the RPI (Rensselaer Polytechnic Institute) Subsonic Wind Tunnel.

A portion of the vector field (sin y, sin x)
Författare/Upphovsman: Acdx, Licens: CC BY-SA 3.0
Illustration of the right-hand rule for the cross product.

Författare/Upphovsman: Alksentrs at en.wikipedia, Licens: CC BY-SA 3.0
R3, cut by 3 planes. A particular vector subspace is highlighted in blue.